Hybrid IK
A downloadable tool
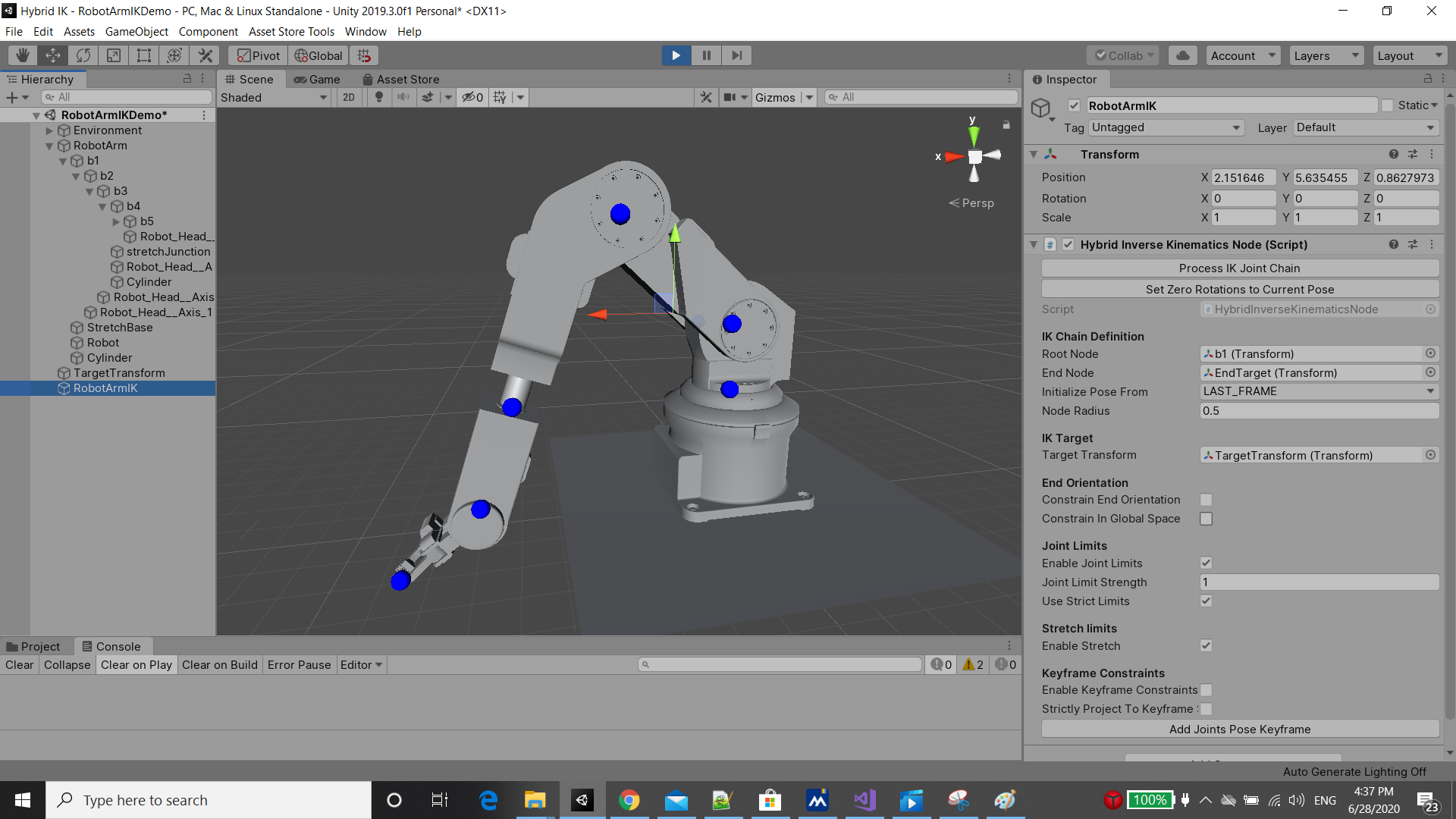
Hybrid IK is a fast, robust, smoothly interpolating Inverse Kinematics solution for Unity which supports joint limits! It is a hybrid system combining the best of both FABRIK and CCD techniques in a novel algorithm to achieve smooth interpolations along large ranges of motion subject to joint limit constraints.
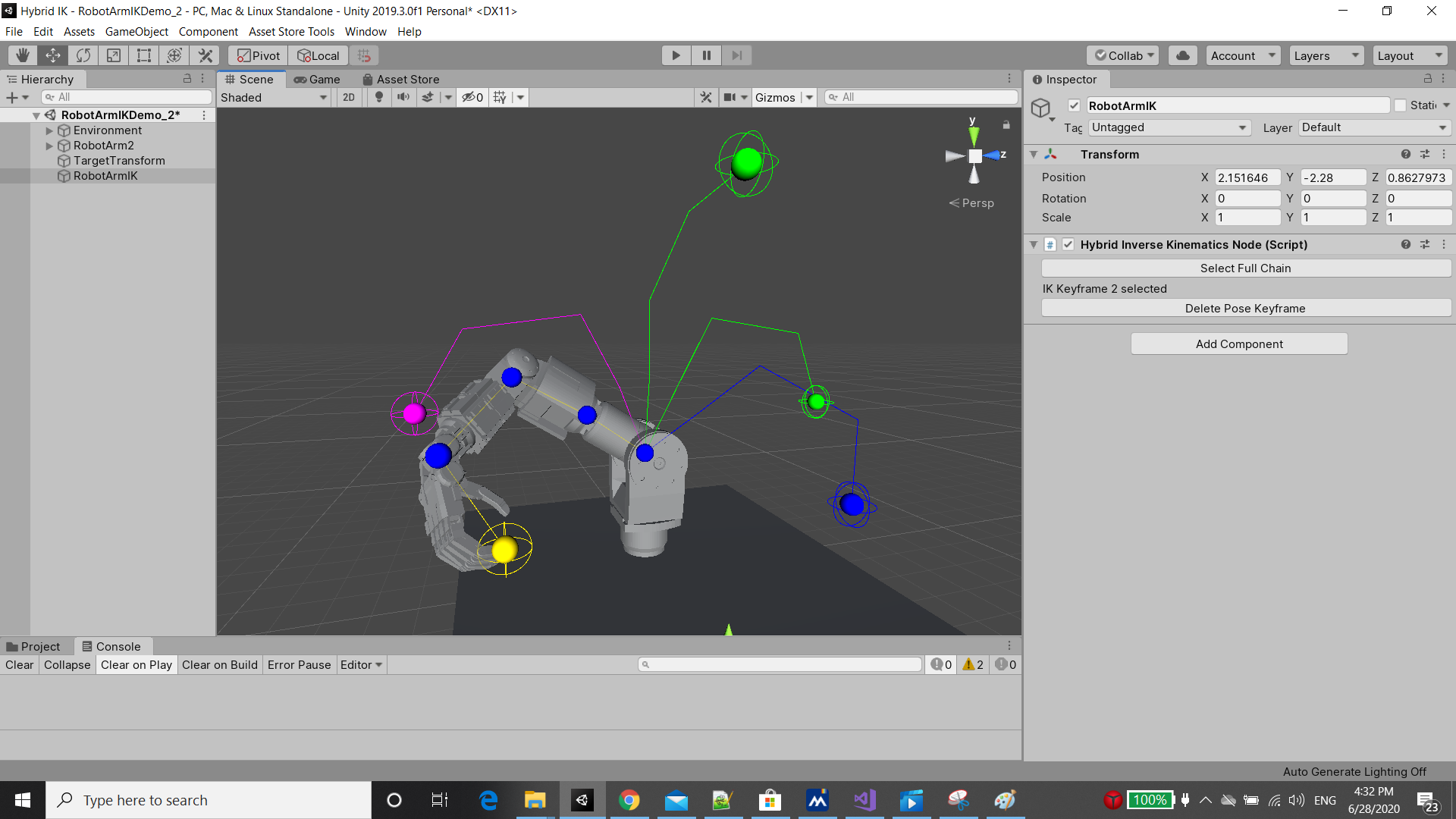
Hybrid IK also offers the optional ability to parametrize the IK space with keyframe poses which can be used to further guide how the IK solution interpolates towards its target in a fast and simple way. This feature alongside the support of stretch limits and the fast and simple way to setup IK hierarchies that strictly follow joint limits while smoothly interpolating along big ranges of motion, make Hybrid IK stand out from the crowd. Fast and easy setup, no scripting required.
Watch the trailer here!
Video Trailer
Features:
- Author Swing twist and Hinge joint limits, which are live editable
- Constrain End orientation
- Add stretch limits, with local x,y,z stretch bounds adding a positional IK component
- Add manual position and orientation constraints upon joints along the IK chain.
Finally, Hybrid IK for Unity supports authoring Keyframe Pose constraints, which creates a mapping between authored keyframe poses and end position targets which will guide how the joint chain interpolates as the end target moves, effectively parametrizing the space!
Package includes 2 demo scenes of Robot Arm IK setups.
All source code included.
Trailer video uses a few assets purchased from the asset store which are not included in the package.
Find tutorial videos here:
https://www.youtube.com/watch?v=oJqRngODDsI&t=3s
https://www.youtube.com/watch?v=v9jmUEIk6Vc&t=33s
For support, email us at ashqarapps@gmail.com
Purchase
In order to download this tool you must purchase it at or above the minimum price of $15 USD. You will get access to the following files:

Leave a comment
Log in with itch.io to leave a comment.